|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
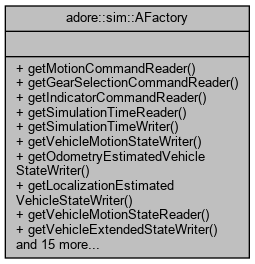
abstract factory for adore::sim communication More...
#include <afactory.h>

Public Member Functions | |
| virtual TMotionCommandReader * | getMotionCommandReader ()=0 |
| read a motion command More... | |
| virtual TGearSelectionCommandReader * | getGearSelectionCommandReader ()=0 |
| read a gear selection command More... | |
| virtual TIndicatorCommandReader * | getIndicatorCommandReader ()=0 |
| read an indicator command More... | |
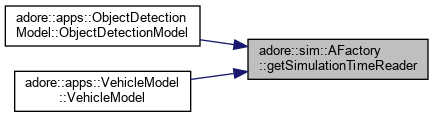
| virtual TSimulationTimeReader * | getSimulationTimeReader ()=0 |
| read the simulation time More... | |
| virtual TSimulationTimeWriter * | getSimulationTimeWriter ()=0 |
| write the simulation time More... | |
| virtual TVehicleMotionStateWriter * | getVehicleMotionStateWriter ()=0 |
| write updates on the true vehicle motion state More... | |
| virtual TVehicleMotionStateWriter * | getOdometryEstimatedVehicleStateWriter ()=0 |
| write updates on the odometry estimated vehicle motion state More... | |
| virtual TVehicleMotionStateWriter * | getLocalizationEstimatedVehicleStateWriter ()=0 |
| write updates on the localization estimated vehicle motion state More... | |
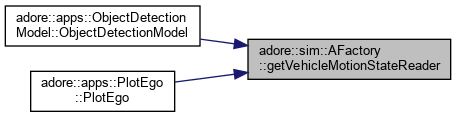
| virtual TVehicleMotionStateReader * | getVehicleMotionStateReader ()=0 |
| read updates on the true vehicle motion state More... | |
| virtual TVehicleExtendedStateWriter * | getVehicleExtendedStateWriter ()=0 |
| write updates on the vehicle extended state (buttons, etc.) More... | |
| virtual TVehiclePoseResetFeed * | getVehiclePoseResetFeed ()=0 |
| read simulation commands for vehicle position and orientation resetting More... | |
| virtual TVehicleTwistResetFeed * | getVehicleTwistResetFeed ()=0 |
| read simulation commands for vehicle speed resetting More... | |
| virtual TVehiclePoseResetWriter * | getVehiclePoseResetWriter ()=0 |
| virtual TVehicleTwistResetWriter * | getVehicleTwistResetWriter ()=0 |
| send simulation commands for vehicle speed resetting More... | |
| virtual TSimulationIDResetFeed * | getSimulationIDResetFeed ()=0 |
| read simulation commands for simulation id resetting More... | |
| virtual TV2XStationIDResetFeed * | getV2XStationIDResetFeed ()=0 |
| read simulation commands for v2x station id resetting More... | |
| virtual TVehicleDimensionsResetWriter * | getVehicleDimensionsResetWriter (std::string ns)=0 |
| write simulation command for vehicle dimensions resetting More... | |
| virtual TVehicleDimensionsResetFeed * | getVehicleDimensionsResetFeed ()=0 |
| read simulation commands for vehicle dimensions resetting More... | |
| virtual TParticipantSetWriter * | getParticipantSetWriter ()=0 |
| send simulated sensor data More... | |
| virtual TParticipantWriter * | getParticipantWriter ()=0 |
| send ego state to simulation feed More... | |
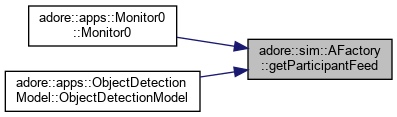
| virtual TParticipantFeed * | getParticipantFeed ()=0 |
| get state updates from all vehicles More... | |
| virtual TClockTimeWriter * | getClockTimeWriter ()=0 |
| write clock time More... | |
| virtual TSimTrafficLightWriter * | getTrafficLightWriter ()=0 |
| send simulated traffic light states More... | |
| virtual TSimTrafficLightReader * | getTrafficLightReader ()=0 |
| receive simulated traffic light states More... | |
| virtual adore::mad::AWriter< int64_t > * | getTransformIDtoAdoreWriter ()=0 |
| send id of vehicle to transform More... | |
abstract factory for adore::sim communication
| typedef adore::mad::AWriter<std::pair<uint32_t,uint32_t> > adore::sim::AFactory::TClockTimeWriter |
| typedef adore::mad::AReader<adore::fun::GearSelectionCommand> adore::sim::AFactory::TGearSelectionCommandReader |
| typedef adore::mad::AReader<adore::fun::IndicatorCommand> adore::sim::AFactory::TIndicatorCommandReader |
| typedef adore::mad::AWriter<adore::env::traffic::TParticipantSet> adore::sim::AFactory::TParticipantSetWriter |
| typedef adore::mad::AWriter<adore::env::traffic::Participant> adore::sim::AFactory::TParticipantWriter |
| typedef adore::mad::AReader<adore::env::SimTrafficLightMap> adore::sim::AFactory::TSimTrafficLightReader |
| typedef adore::mad::AWriter<adore::env::SimTrafficLight> adore::sim::AFactory::TSimTrafficLightWriter |
| typedef adore::mad::AFeedWithCallback<std::string> adore::sim::AFactory::TSimulationCoordinationFeed |
| typedef adore::mad::AWriter<std::string> adore::sim::AFactory::TSimulationCoordinationWriter |
| typedef adore::mad::AFeed<int64_t> adore::sim::AFactory::TSimulationIDResetFeed |
| typedef adore::mad::AReader<double> adore::sim::AFactory::TSimulationTimeReader |
| typedef adore::mad::AWriter<double> adore::sim::AFactory::TSimulationTimeWriter |
| typedef adore::mad::AFeed<int64_t> adore::sim::AFactory::TV2XStationIDResetFeed |
| typedef adore::mad::AFeed<adore::sim::ResetVehicleDimensions> adore::sim::AFactory::TVehicleDimensionsResetFeed |
| typedef adore::mad::AWriter<adore::sim::ResetVehicleDimensions> adore::sim::AFactory::TVehicleDimensionsResetWriter |
| typedef adore::mad::AWriter<adore::fun::VehicleExtendedState> adore::sim::AFactory::TVehicleExtendedStateWriter |
| typedef adore::mad::AReader<adore::fun::VehicleMotionState9d> adore::sim::AFactory::TVehicleMotionStateReader |
| typedef adore::mad::AWriter<adore::fun::VehicleMotionState9d> adore::sim::AFactory::TVehicleMotionStateWriter |
| typedef adore::mad::AWriter<adore::sim::ResetVehiclePose> adore::sim::AFactory::TVehiclePoseResetWriter |
| typedef adore::mad::AFeed<adore::sim::ResetVehicleTwist> adore::sim::AFactory::TVehicleTwistResetFeed |
| typedef adore::mad::AWriter<adore::sim::ResetVehicleTwist> adore::sim::AFactory::TVehicleTwistResetWriter |
|
pure virtual |
write clock time
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
read a gear selection command
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
read an indicator command
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
write updates on the localization estimated vehicle motion state
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
read a motion command
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
write updates on the odometry estimated vehicle motion state
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
get state updates from all vehicles
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
send simulated sensor data
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
send ego state to simulation feed
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
read simulation commands for simulation id resetting
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
read the simulation time
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
write the simulation time
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
receive simulated traffic light states
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
send simulated traffic light states
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
send id of vehicle to transform
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
read simulation commands for v2x station id resetting
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
read simulation commands for vehicle dimensions resetting
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
write simulation command for vehicle dimensions resetting
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
write updates on the vehicle extended state (buttons, etc.)
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
read updates on the true vehicle motion state
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
write updates on the true vehicle motion state
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
read simulation commands for vehicle position and orientation resetting
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
Implemented in adore::if_ROS::SIM_Factory.
|
pure virtual |
read simulation commands for vehicle speed resetting
Implemented in adore::if_ROS::SIM_Factory.

|
pure virtual |
send simulation commands for vehicle speed resetting
Implemented in adore::if_ROS::SIM_Factory.