|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
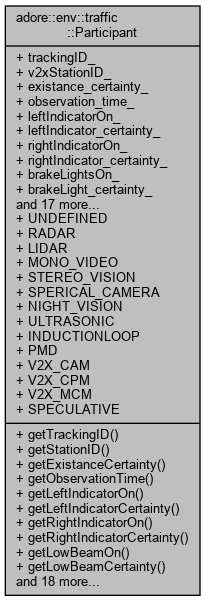
Struct for representing a participant in traffic. More...
#include <participant.h>
Public Types | |
| enum | EClassification : int { UNCLASSIFIED =0 , UNKNOWN_SMALL =1 , UNKNOWN_BIG =2 , UNDER_DRIVABLE =3 , OVER_DRIVABLE =4 , PEDESTRIAN =5 , BIKE =6 , BICYCLE =7 , MOPED =8 , MOTORCYCLE =9 , CAR =10 , VAN =11 , BUS =12 , TRUCK =13 , LIGHT_TRUCK =14 , HEAVY_TRUCK =15 , TRAM =16 , TRAILER =17 , SPECIAL_VEHICLE =18 , PEDESTRIAN_GROUP =19 , TRAIN =20 , HORSE_RIDER =21 , ANIMAL_SMALL =22 , ANIMAL_BIG =23 } |
| typedef int | TTrackingID |
| typedef long long int | TV2XStationID |
| typedef adoreMatrix< double, 7, 7 > | TCovariance |
Public Member Functions | |
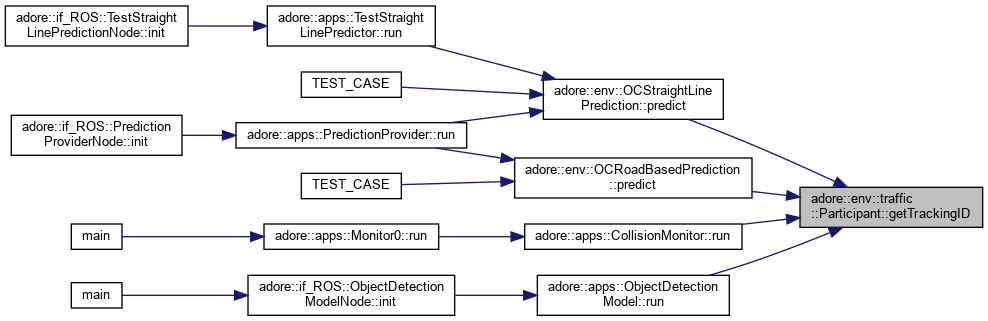
| TTrackingID | getTrackingID () const |
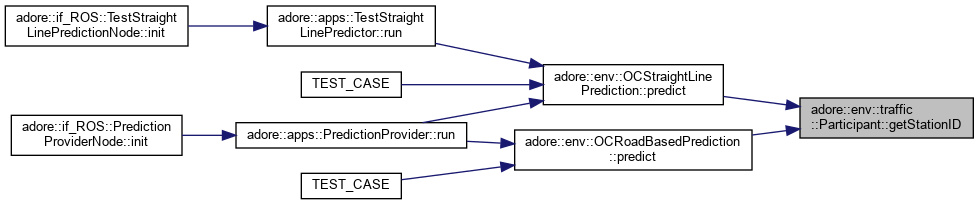
| TV2XStationID | getStationID () const |
| double | getExistanceCertainty () const |
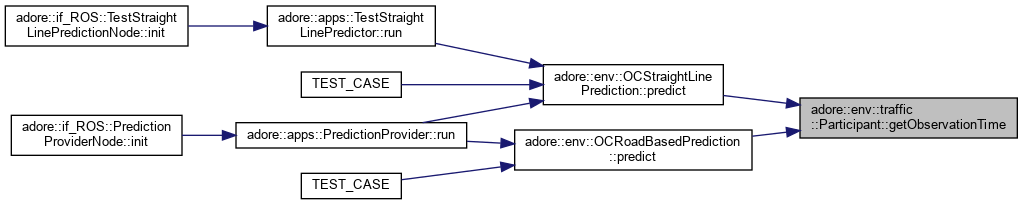
| double | getObservationTime () const |
| bool | getLeftIndicatorOn () const |
| double | getLeftIndicatorCertainty () const |
| bool | getRightIndicatorOn () const |
| double | getRightIndicatorCertainty () const |
| bool | getLowBeamOn () const |
| double | getLowBeamCertainty () const |
| bool | getHighBeamOn () const |
| double | getHighBeamCertainty () const |
| unsigned int | getDetectionBySensor () const |
| EClassification | getClassification () const |
| double | getClassificationCertainty () const |
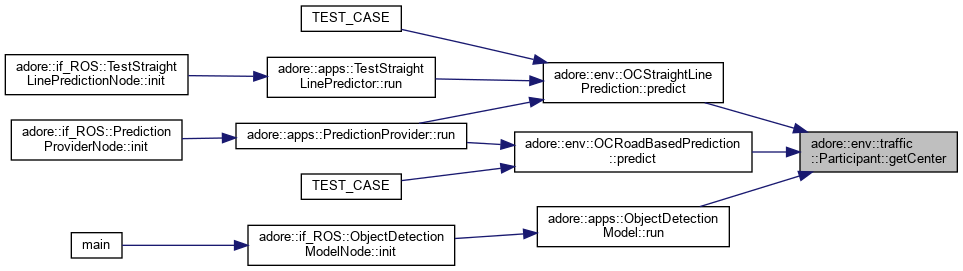
| const adoreMatrix< double, 3, 1 > & | getCenter () const |
| adoreMatrix< double, 3, 1 > | getFrontLeftCorner () const |
| adoreMatrix< double, 3, 1 > | getFrontRightCorner () const |
| adoreMatrix< double, 3, 1 > | getRearLeftCorner () const |
| adoreMatrix< double, 3, 1 > | getRearRightCorner () const |
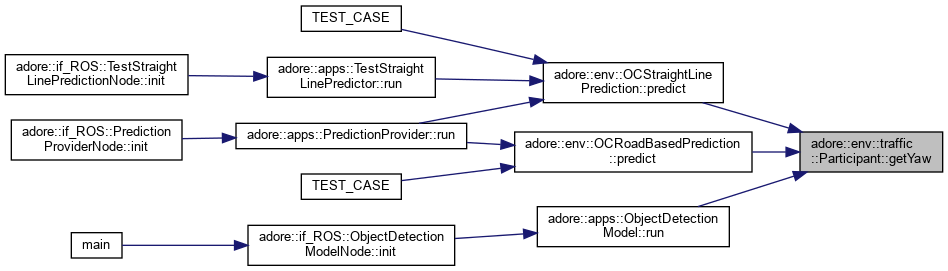
| double | getYaw () const |
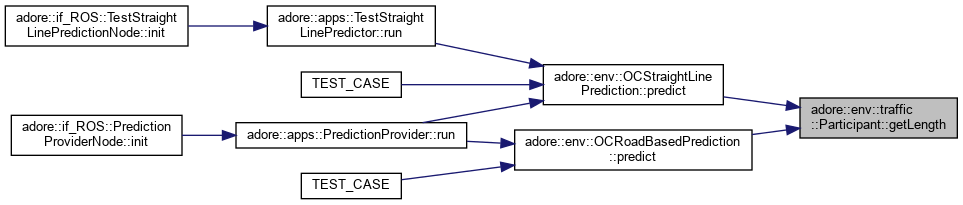
| double | getLength () const |
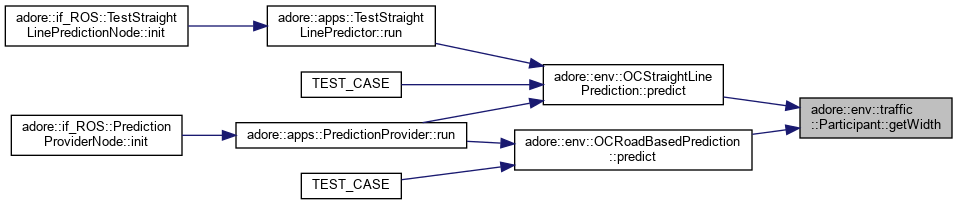
| double | getWidth () const |
| double | getVx () const |
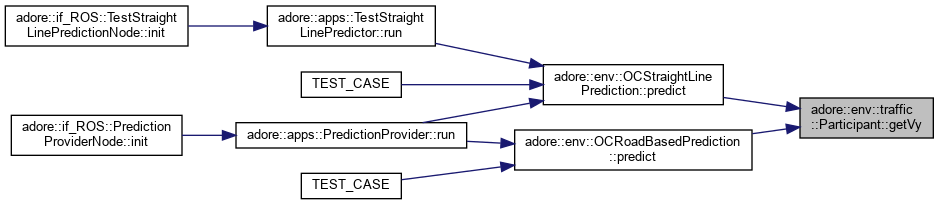
| double | getVy () const |
| double | getYawRate () const |
| double | getAx () const |
| const TCovariance & | getCovariance () const |
Public Attributes | |
| TTrackingID | trackingID_ |
| TV2XStationID | v2xStationID_ |
| double | existance_certainty_ |
| double | observation_time_ |
| bool | leftIndicatorOn_ |
| double | leftIndicator_certainty_ |
| bool | rightIndicatorOn_ |
| double | rightIndicator_certainty_ |
| bool | brakeLightsOn_ |
| double | brakeLight_certainty_ |
| bool | lowBeamOn_ |
| double | lowBeamCertainty_ |
| bool | highBeamOn_ |
| double | highBeamCertainty_ |
| unsigned int | detection_by_sensor_ |
| EClassification | classification_ |
| double | classification_certainty_ |
| adoreMatrix< double, 3, 1 > | center_ |
| double | yaw_ |
| double | length_ |
| double | width_ |
| double | height_ |
| double | vx_ |
| double | vy_ |
| double | yawrate_ |
| double | acceleration_x_ |
| TCovariance | covariance_ |
Static Public Attributes | |
| static const unsigned int | UNDEFINED = 1 |
| static const unsigned int | RADAR = 2 |
| static const unsigned int | LIDAR = 4 |
| static const unsigned int | MONO_VIDEO = 8 |
| static const unsigned int | STEREO_VISION = 16 |
| static const unsigned int | SPERICAL_CAMERA = 32 |
| static const unsigned int | NIGHT_VISION = 64 |
| static const unsigned int | ULTRASONIC = 128 |
| static const unsigned int | INDUCTIONLOOP = 256 |
| static const unsigned int | PMD = 512 |
| static const unsigned int | V2X_CAM = 1024 |
| static const unsigned int | V2X_CPM = 2048 |
| static const unsigned int | V2X_MCM = 4096 |
| static const unsigned int | SPECULATIVE = 2147483648 |
Struct for representing a participant in traffic.
| typedef adoreMatrix<double,7,7> adore::env::traffic::Participant::TCovariance |
| typedef int adore::env::traffic::Participant::TTrackingID |
| typedef long long int adore::env::traffic::Participant::TV2XStationID |
|
inline |

|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |

|
inline |

|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |

|
inline |

|
inline |
|
inline |
|
inline |
|
inline |
|
inline |

|
inline |
|
inline |
|
inline |
|
inline |
| double adore::env::traffic::Participant::acceleration_x_ |
acceleration in yaw direction
| double adore::env::traffic::Participant::brakeLight_certainty_ |
confidence about brake light state 0..100
| bool adore::env::traffic::Participant::brakeLightsOn_ |
state of the brake lights
| adoreMatrix<double,3,1> adore::env::traffic::Participant::center_ |
| EClassification adore::env::traffic::Participant::classification_ |
type of traffic participant -> classification values
| double adore::env::traffic::Participant::classification_certainty_ |
confidence of classification 0..100
| TCovariance adore::env::traffic::Participant::covariance_ |
[X,Y,Z,yaw,vx,vy,yawrate]^2
| unsigned int adore::env::traffic::Participant::detection_by_sensor_ |
bit array -> sensor type values
| double adore::env::traffic::Participant::existance_certainty_ |
confidence that traffic participant exists 0..100
| double adore::env::traffic::Participant::height_ |
extend of box projected on up vector
| double adore::env::traffic::Participant::highBeamCertainty_ |
confidence about head light state 0..100
| bool adore::env::traffic::Participant::highBeamOn_ |
state of the head lights
|
static |
| double adore::env::traffic::Participant::leftIndicator_certainty_ |
confidence of detection of left indicator state 0..100
| bool adore::env::traffic::Participant::leftIndicatorOn_ |
indicator in yaw direction on the left side
| double adore::env::traffic::Participant::length_ |
extend of box projected to yaw direction vector
|
static |
| double adore::env::traffic::Participant::lowBeamCertainty_ |
confidence about head light state 0..100
| bool adore::env::traffic::Participant::lowBeamOn_ |
state of the head lights
|
static |
|
static |
| double adore::env::traffic::Participant::observation_time_ |
time corresponding to state
|
static |
|
static |
| double adore::env::traffic::Participant::rightIndicator_certainty_ |
| bool adore::env::traffic::Participant::rightIndicatorOn_ |
indicator in yaw direction on the right side
|
static |
2^31, not observed by any sensor but rather speculated to exist in occlusion area
|
static |
|
static |
| TTrackingID adore::env::traffic::Participant::trackingID_ |
internal tracking id, providing highest possible continuity
|
static |
|
static |
|
static |
|
static |
|
static |
| TV2XStationID adore::env::traffic::Participant::v2xStationID_ |
etsi vehicle to x id
| double adore::env::traffic::Participant::vx_ |
speed in yaw direction
| double adore::env::traffic::Participant::vy_ |
speed perpendicular to yaw direction
| double adore::env::traffic::Participant::width_ |
xtend of box perpendicular to yaw and up
| double adore::env::traffic::Participant::yaw_ |
orientation of the box: straight east is 0, straight north is pi/2
| double adore::env::traffic::Participant::yawrate_ |
d/dt yaw