|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
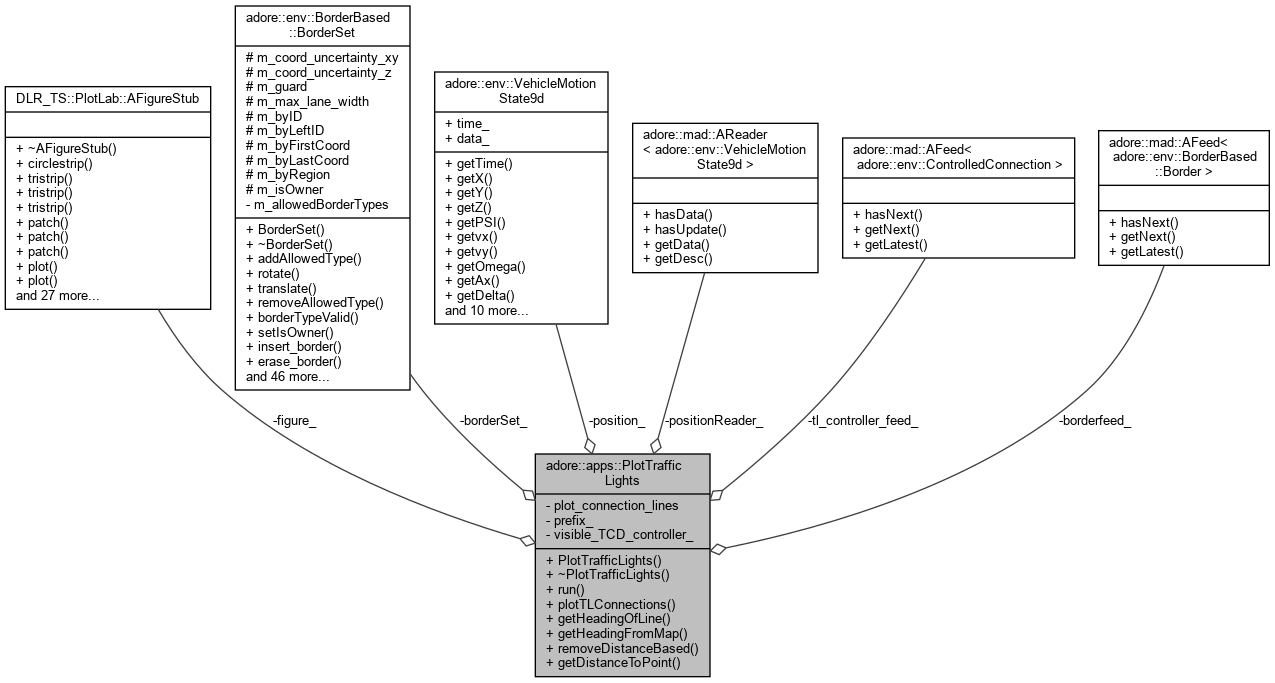
a optimzed plotting application to plot map borders, vehicles and environment information and background image satellite footage More...
#include <plot_trafficlights.h>
Public Member Functions | |
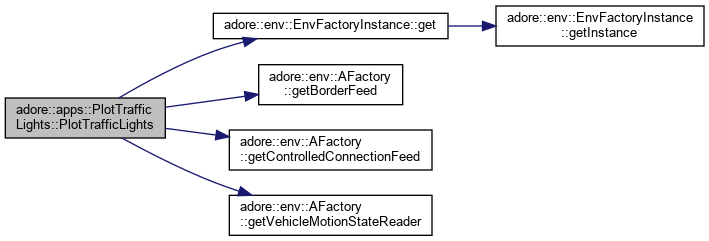
| PlotTrafficLights (DLR_TS::PlotLab::AFigureStub *figure, std::string prefix, bool connection_lines=false) | |
| ~PlotTrafficLights () | |
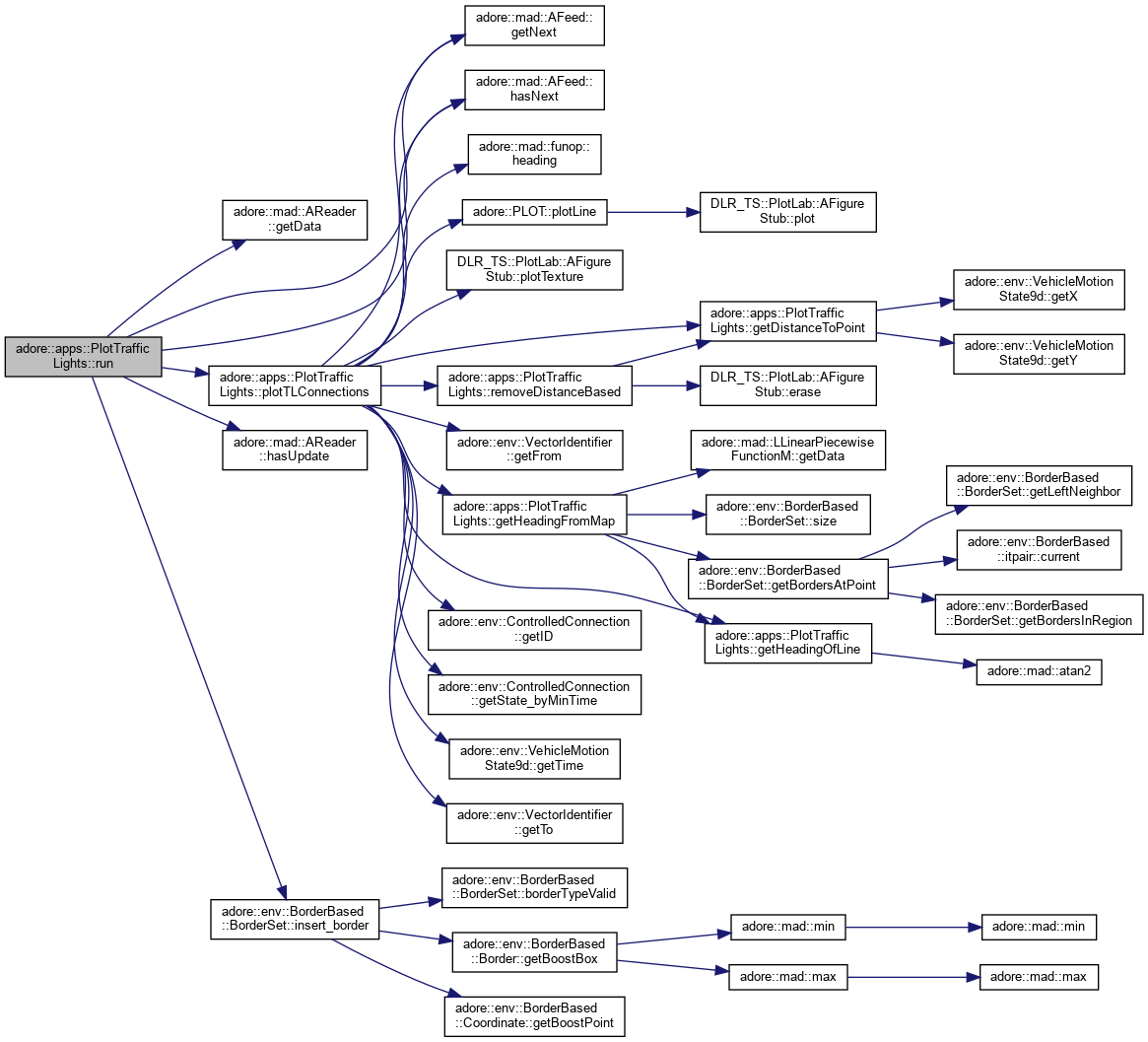
| void | run () |
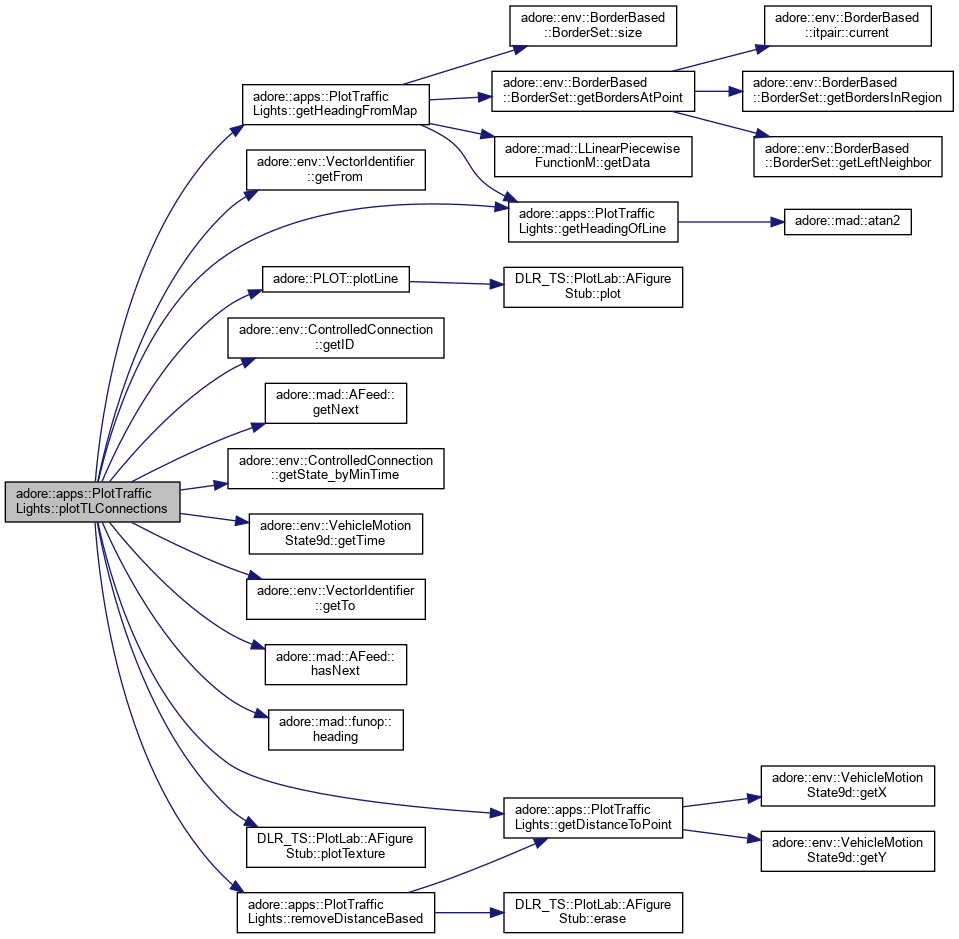
| virtual void | plotTLConnections () |
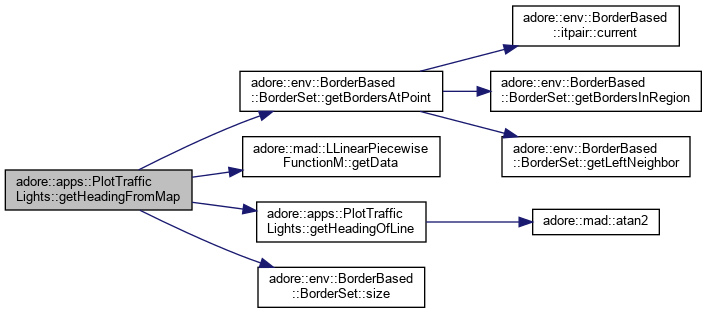
| double | getHeadingOfLine (double x1, double y1, double x2, double y2) |
| double | getHeadingFromMap (double x, double y) |
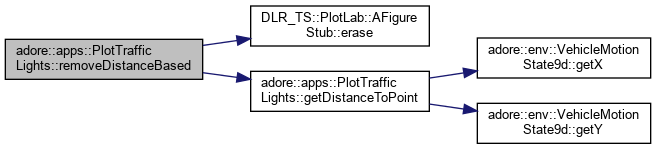
| void | removeDistanceBased (std::unordered_map< std::string, std::pair< double, double >> &visible_objects, int distance) |
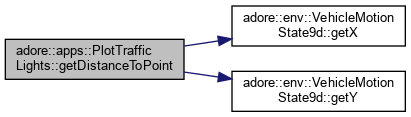
| double | getDistanceToPoint (std::pair< double, double > &point) |
Private Attributes | |
| adore::mad::AReader< adore::env::VehicleMotionState9d > * | positionReader_ |
| adore::mad::AFeed< adore::env::ControlledConnection > * | tl_controller_feed_ |
| adore::mad::AFeed< adore::env::BorderBased::Border > * | borderfeed_ |
| bool | plot_connection_lines = true |
| DLR_TS::PlotLab::AFigureStub * | figure_ |
| adore::env::VehicleMotionState9d | position_ |
| std::string | prefix_ |
| std::unordered_map< std::string, std::pair< double, double > > | visible_TCD_controller_ |
| adore::env::BorderBased::BorderSet | borderSet_ |
a optimzed plotting application to plot map borders, vehicles and environment information and background image satellite footage
|
inline |
|
inline |
|
inline |

|
inline |

|
inline |


|
inlinevirtual |

|
inline |

|
inline |

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |