|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
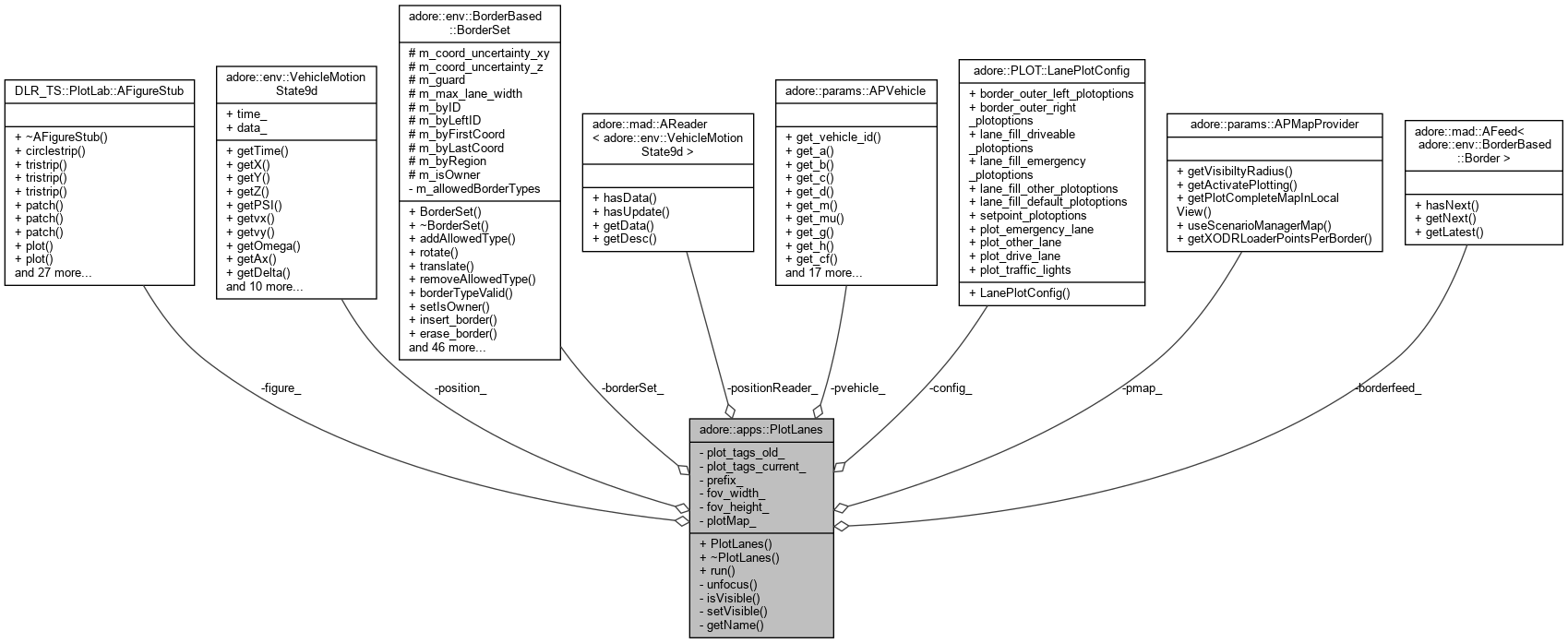
a optimzed plotting application to plot map borders, vehicles and environment information and background image satellite footage More...
#include <plot_lanes.h>
Classes | |
| struct | info |
Public Member Functions | |
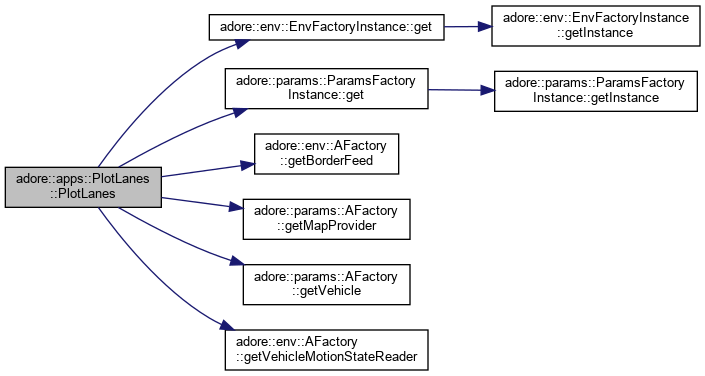
| PlotLanes (DLR_TS::PlotLab::AFigureStub *figure, std::string prefix, const adore::PLOT::LanePlotConfig &config) | |
| ~PlotLanes () | |
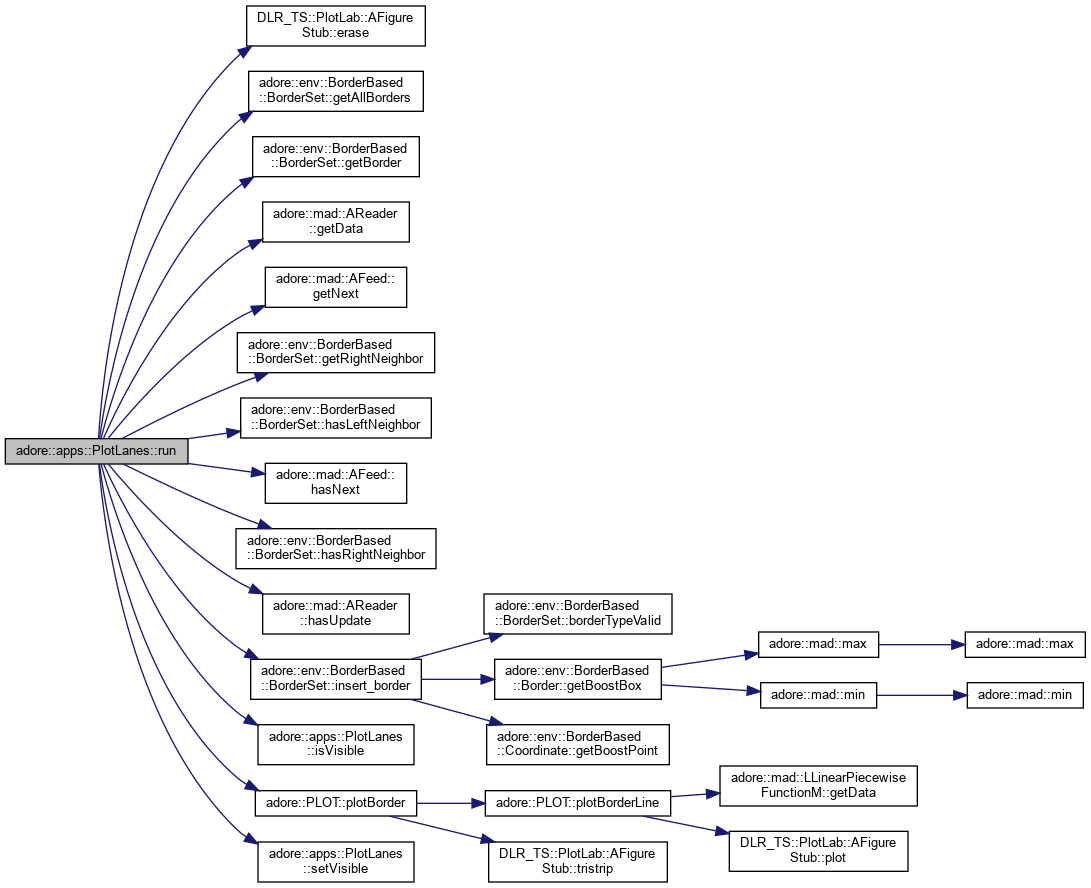
| void | run () |
Private Member Functions | |
| void | unfocus (adore::env::BorderBased::BorderID id) |
| bool | isVisible (adore::env::BorderBased::BorderID id) |
| void | setVisible (adore::env::BorderBased::BorderID id, bool visible) |
| std::string | getName (adore::env::BorderBased::BorderID id) |
Private Attributes | |
| adore::params::APVehicle * | pvehicle_ |
| adore::params::APMapProvider * | pmap_ |
| adore::mad::AReader< adore::env::VehicleMotionState9d > * | positionReader_ |
| adore::mad::AFeed< adore::env::BorderBased::Border > * | borderfeed_ |
| std::unordered_set< std::string > | plot_tags_old_ |
| std::unordered_set< std::string > | plot_tags_current_ |
| DLR_TS::PlotLab::AFigureStub * | figure_ |
| adore::env::BorderBased::BorderSet | borderSet_ |
| adore::env::VehicleMotionState9d | position_ |
| std::string | prefix_ |
| double | fov_width_ |
| double | fov_height_ |
| adore::PLOT::LanePlotConfig | config_ |
| std::map< adore::env::BorderBased::BorderID, info > | plotMap_ |
a optimzed plotting application to plot map borders, vehicles and environment information and background image satellite footage
|
inline |
|
inline |
|
inlineprivate |
|
inlineprivate |

|
inline |
plot borders

|
inlineprivate |

|
inlineprivate |

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |