|
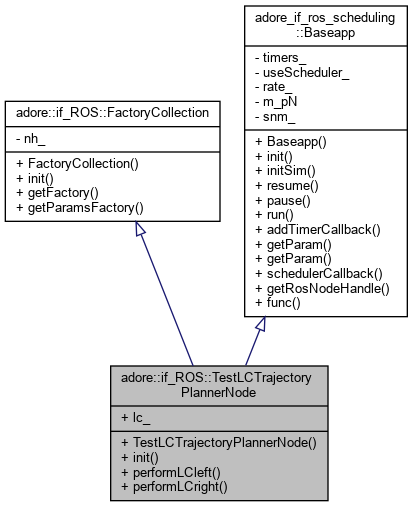
| | TestLCTrajectoryPlannerNode () |
| |
| void | init (int argc, char **argv, double rate, std::string nodename) |
| |
| void | performLCleft () |
| |
| void | performLCright () |
| |
| | FactoryCollection (ros::NodeHandle *nh=nullptr) |
| |
| void | init (ros::NodeHandle *nh=nullptr, std::string param_namespace="") |
| |
| template<typename T > |
| T * | getFactory () |
| |
| PARAMS_Factory * | getParamsFactory (std::string prefix="") |
| |
| | Baseapp () |
| |
| void | init (int argc, char **argv, double rate, std::string nodename) |
| |
| void | initSim () |
| |
| virtual void | resume () |
| |
| virtual void | pause () |
| |
| virtual void | run () |
| |
| virtual void | addTimerCallback (std::function< void()> &callbackFcn, double rate_factor=1.0) |
| |
| template<typename T > |
| bool | getParam (const std::string name, T &val) |
| |
| template<typename T > |
| bool | getParam (const std::string name, T &val, const T &default_val) |
| |
◆ TestLCTrajectoryPlannerNode()
| adore::if_ROS::TestLCTrajectoryPlannerNode::TestLCTrajectoryPlannerNode |
( |
| ) |
|
|
inline |
◆ init()
| void adore::if_ROS::TestLCTrajectoryPlannerNode::init |
( |
int |
argc, |
|
|
char ** |
argv, |
|
|
double |
rate, |
|
|
std::string |
nodename |
|
) |
| |
|
inline |
◆ performLCleft()
| void adore::if_ROS::TestLCTrajectoryPlannerNode::performLCleft |
( |
| ) |
|
|
inline |
◆ performLCright()
| void adore::if_ROS::TestLCTrajectoryPlannerNode::performLCright |
( |
| ) |
|
|
inline |
◆ lc_
The documentation for this class was generated from the following file:


 Public Member Functions inherited from adore::if_ROS::FactoryCollection
Public Member Functions inherited from adore::if_ROS::FactoryCollection




