|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
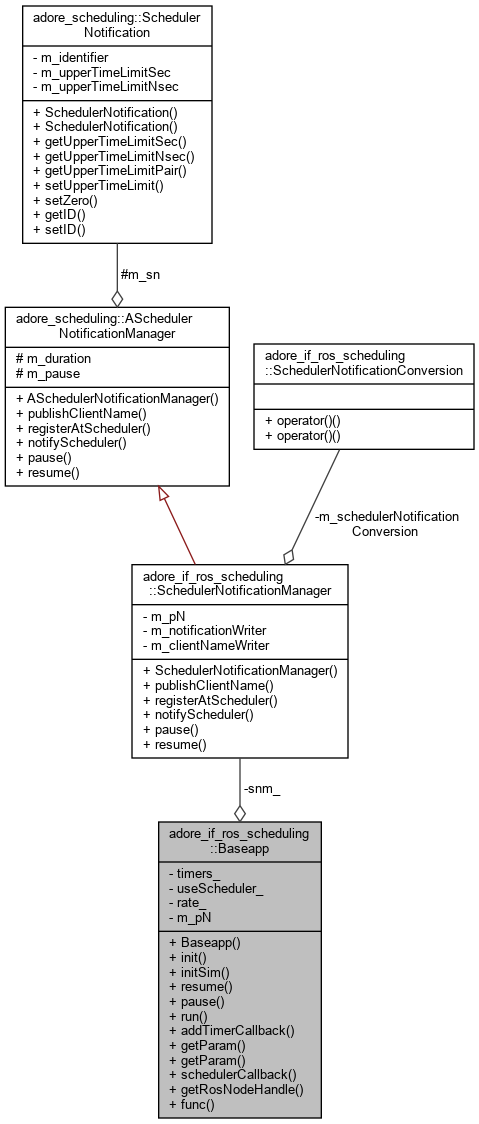
#include <baseapp.h>

Public Member Functions | |
| Baseapp () | |
| void | init (int argc, char **argv, double rate, std::string nodename) |
| void | initSim () |
| virtual void | resume () |
| virtual void | pause () |
| virtual void | run () |
| virtual void | addTimerCallback (std::function< void()> &callbackFcn, double rate_factor=1.0) |
| template<typename T > | |
| bool | getParam (const std::string name, T &val) |
| template<typename T > | |
| bool | getParam (const std::string name, T &val, const T &default_val) |
Static Public Member Functions | |
| static void | schedulerCallback (const ros::TimerEvent &e) |
| static ros::NodeHandle * | getRosNodeHandle () |
| static void | func (std::function< void()> &callback, const ros::TimerEvent &te) |
Private Attributes | |
| std::vector< ros::Timer > | timers_ |
| bool | useScheduler_ |
| double | rate_ |
Static Private Attributes | |
| static ros::NodeHandle * | m_pN = 0 |
| static adore_if_ros_scheduling::SchedulerNotificationManager * | snm_ |
Base class for ros nodes - Baseapp provides functions that can be used by derived ros nodes. It handles the communication with the scheduler node.
|
inline |
|
inlinevirtual |
addTimerCallback - add a function that should be called periodically


|
inlinestatic |

|
inline |
getParam - retrieve ros parameter

|
inline |
getParam - retrieve ros parameter with default
|
inlinestatic |
getRosNodeHandle - return ros::NodeHandle pointer

|
inline |
init - initializes the ros node
|
inline |
initSim - intilizes functionalites for simulation

|
inlinevirtual |
pause - pauses updating the upper time bound

|
inlinevirtual |
resume - resumes updating the upper time bound

|
inlinevirtual |
run

|
inlinestatic |
schedulerCallback - notifies scheduler of the new upper bound in time


|
inlinestaticprivate |
|
private |
|
inlinestaticprivate |
|
private |
|
private |