|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
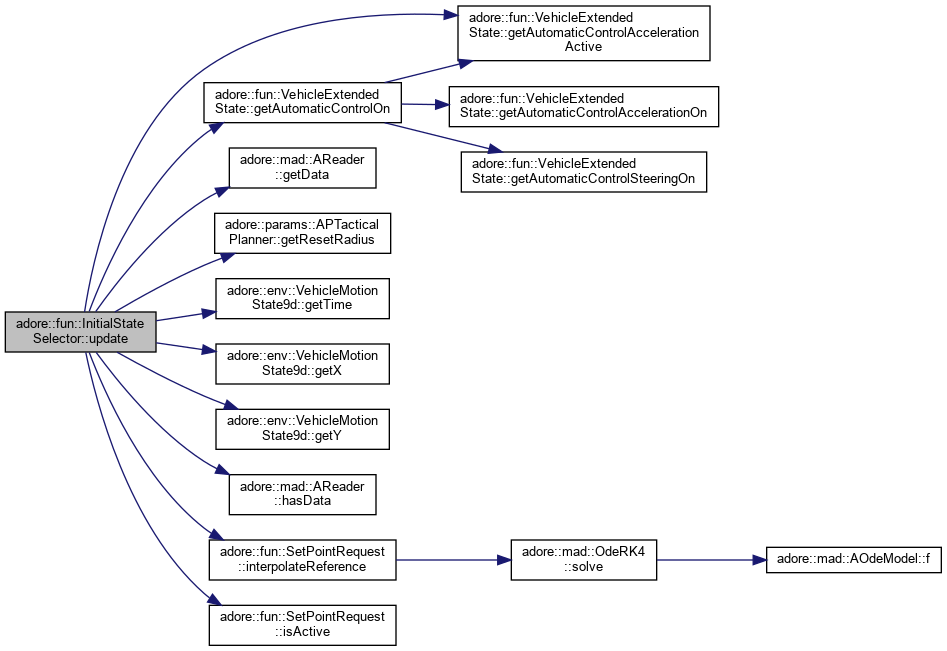
Helps to select initial state for motion planning. Considers previous plan, current vehicle state, vehicle extended state. More...
#include <initial_state_selector.h>

Public Member Functions | |
| InitialStateSelector () | |
| ~InitialStateSelector () | |
| void | setExecutedTrajectory (const SetPointRequest &spr_ex) |
| void | update () |
Helps to select initial state for motion planning. Considers previous plan, current vehicle state, vehicle extended state.
|
inline |

|
inline |
|
inline |

|
inline |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |