|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
#include <adore/mad/adoremath.h>#include <adore/mad/fun_essentials.h>#include <adore/mad/centerline.h>#include <adore/env/borderbased/borderaccumulator.h>#include <adore/env/borderbased/bordertrace.h>#include <adore/env/ego/vehiclemotionstate9d.h>#include <adore/env/borderbased/bordercostmap.h>#include <adore/mad/linearfunctiontypedefs.h>#include "csaps.h"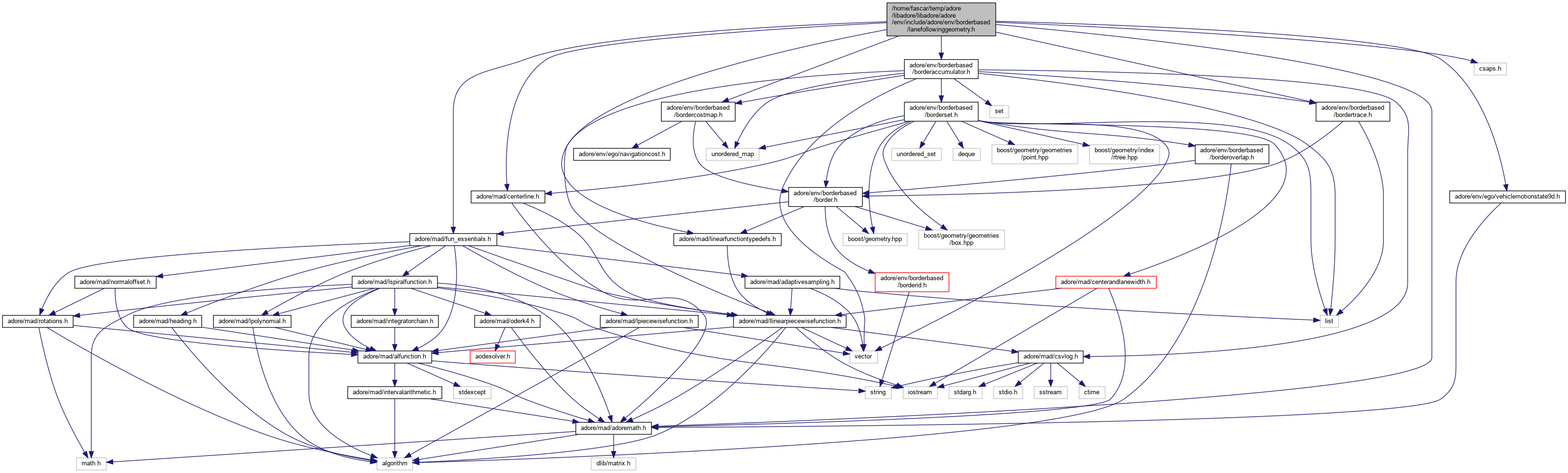

Go to the source code of this file.
Classes | |
| class | adore::env::BorderBased::LaneFollowingGeometry< PolyFitPoints, PolyEvaluatePoints > |
| A class with a geometry description of the current lane. More... | |
Namespaces | |
| adore | |
| adore::env | |
| adore::env::BorderBased | |