|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
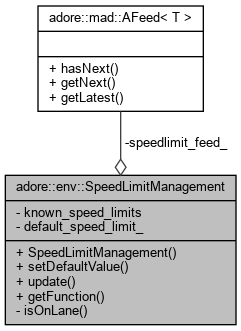
automatically manage speed limit information based on current vehicle position More...
#include <map_speedlimit_management.h>
Public Member Functions | |
| SpeedLimitManagement () | |
| void | setDefaultValue (double value) |
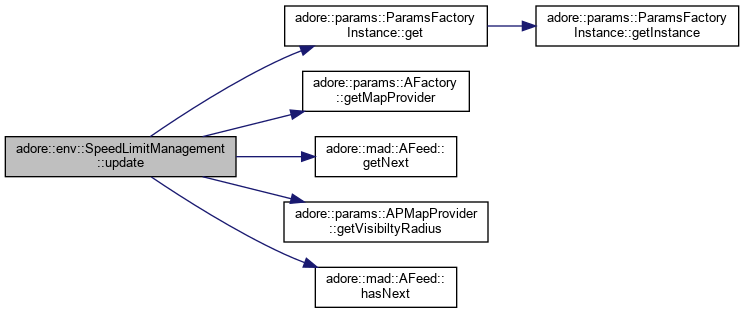
| void | update (double const &egoX, double const &egoY) |
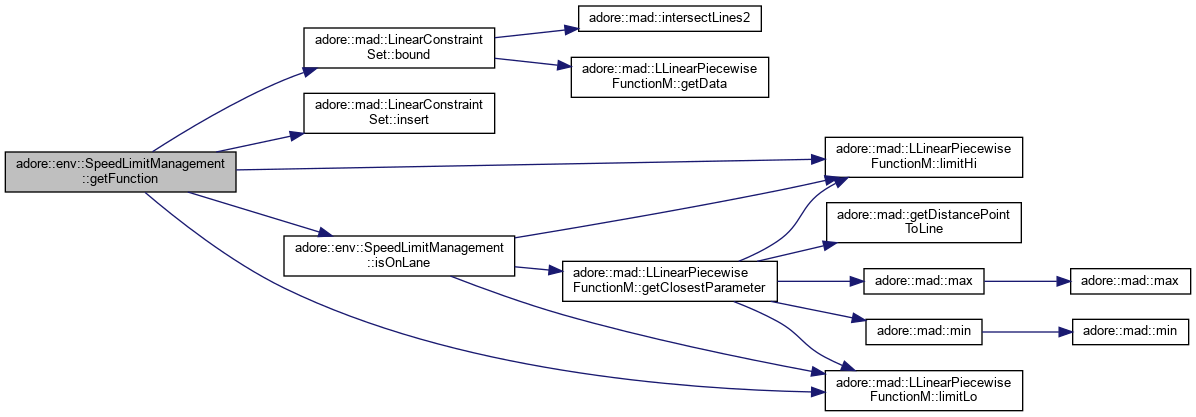
| void const | getFunction (adore::mad::function_type_xyz ¢erSmoothed_fct, adore::mad::function_type_scalar &leftOffset_fct, adore::mad::function_type_scalar &rightOffset_fct, adore::mad::function_type_scalar &speedLimitOutput_fct) |
Private Member Functions | |
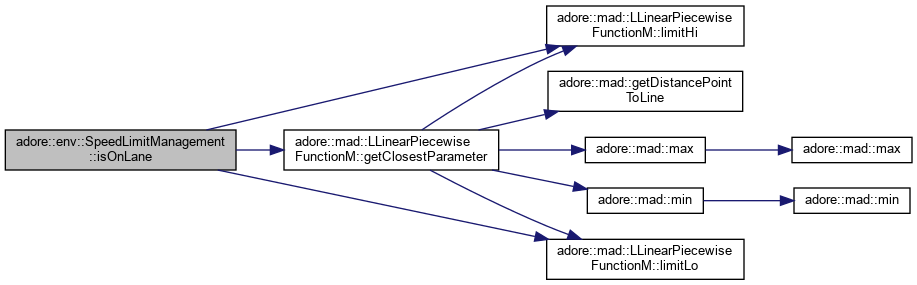
| bool const | isOnLane (adore::mad::function_type_xyz const ¢erSmoothed_fct, adore::mad::function_type_scalar const &leftOffset_fct, adore::mad::function_type_scalar const &rightOffset_fct, double const &x, double const &y, double &s) |
| helper function to determine if a eucledian (x,y) point is on the lane or outside, set s of the point More... | |
Private Attributes | |
| adore::env::AFactory::TSpeedLimitFeed * | speedlimit_feed_ |
| std::unordered_map< adore::env::TSpeedLimitID, adore::env::SpeedLimit > | known_speed_limits |
| double | default_speed_limit_ |
automatically manage speed limit information based on current vehicle position
|
inline |

|
inline |

|
inlineprivate |
helper function to determine if a eucledian (x,y) point is on the lane or outside, set s of the point
| x | |
| y | |
| s |

|
inline |

|
inline |

|
private |
|
private |
|
private |