|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|


|
|
ADORe
ADORe is a modular open source software library and toolkit for decision making, planning, control and simulation of automated vehicles
|
|
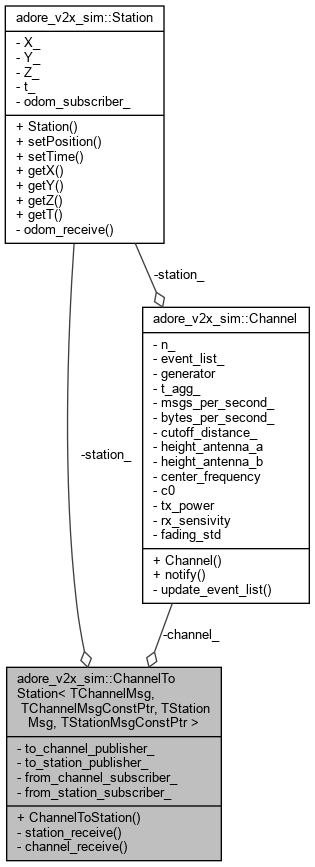
#include <channel2station.h>
Public Member Functions | |
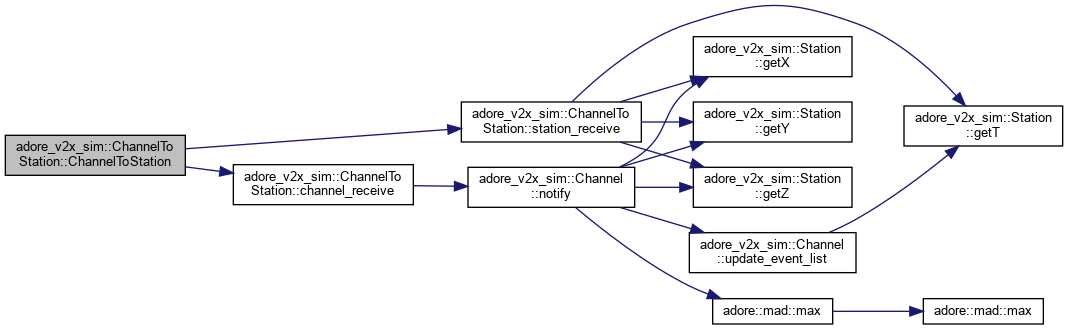
| ChannelToStation (ros::NodeHandle &n, std::string channel_incoming_topic, std::string channel_outgoing_topic, std::string station_incoming_topic, std::string station_outgoing_topic, Station *station, Channel *channel) | |
Private Member Functions | |
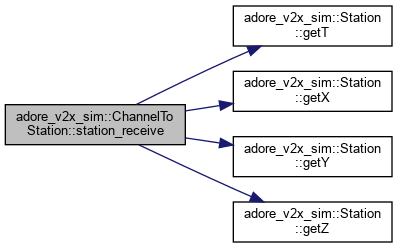
| void | station_receive (TStationMsgConstPtr msg) |
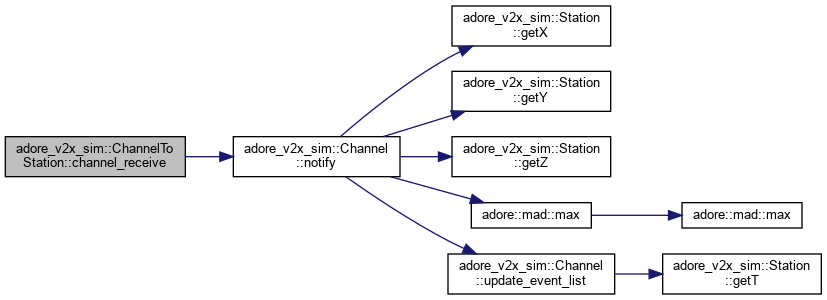
| void | channel_receive (TChannelMsgConstPtr msg) |
Private Attributes | |
| ros::Publisher | to_channel_publisher_ |
| ros::Publisher | to_station_publisher_ |
| ros::Subscriber | from_channel_subscriber_ |
| ros::Subscriber | from_station_subscriber_ |
| Station * | station_ |
| Channel * | channel_ |
ChannelToStation class handles message hand-over between simulated channel and station v2x topic
|
inline |
|
inlineprivate |

|
inlineprivate |

|
private |
|
private |
|
private |
|
private |
|
private |
|
private |