|
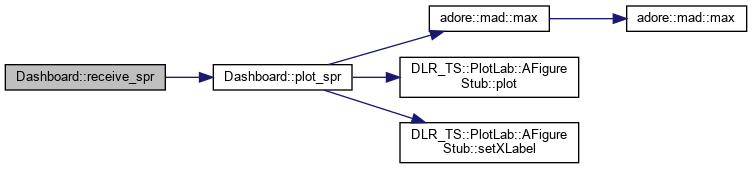
| void | plot_spr () |
| |
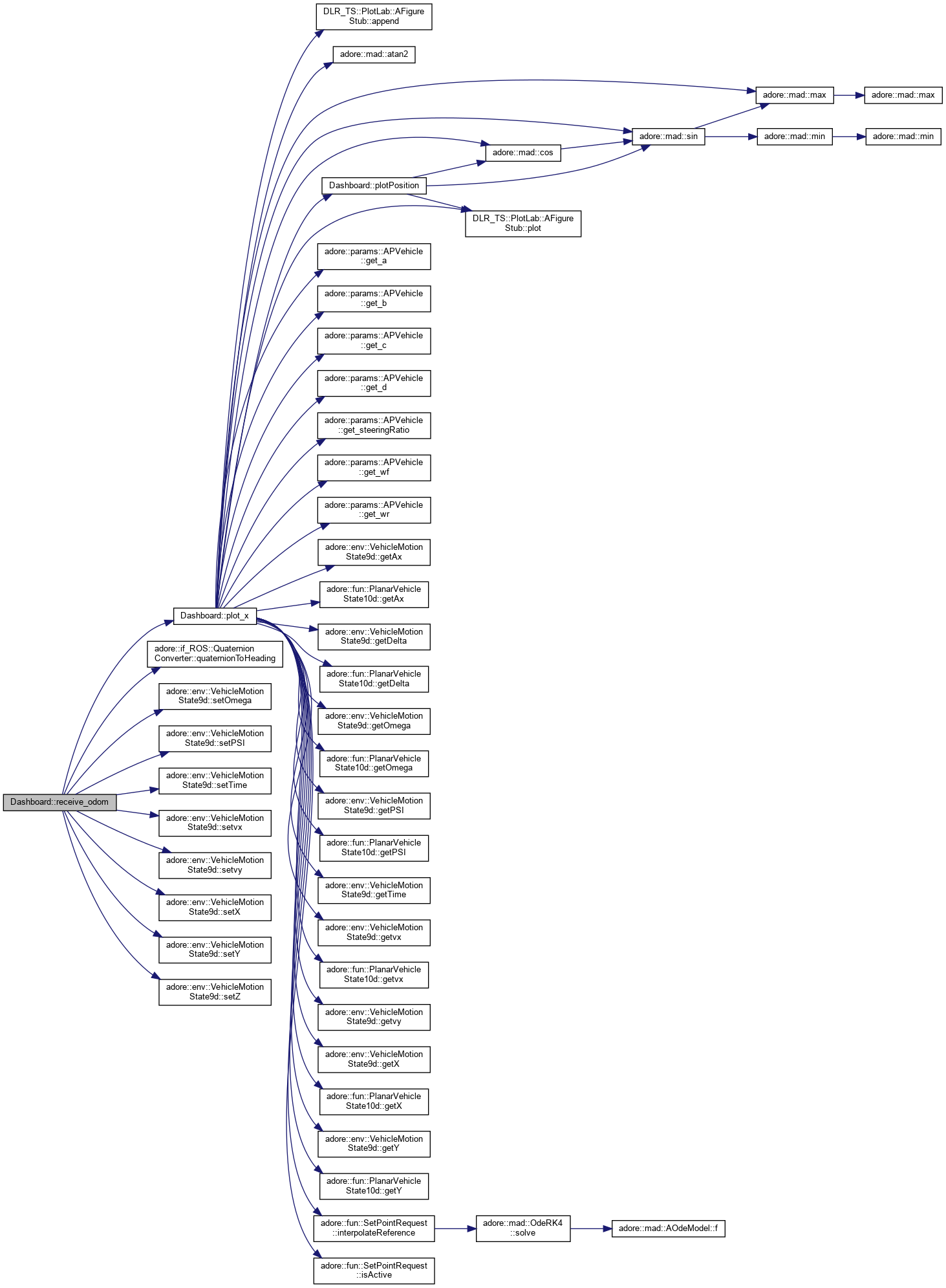
| void | plot_x () |
| |
| void | plotPosition (const std::string &name, double gX, double gY, double psi, double L, double c, double d, double w, const std::string &options) |
| | plotting a vehicle More...
|
| |
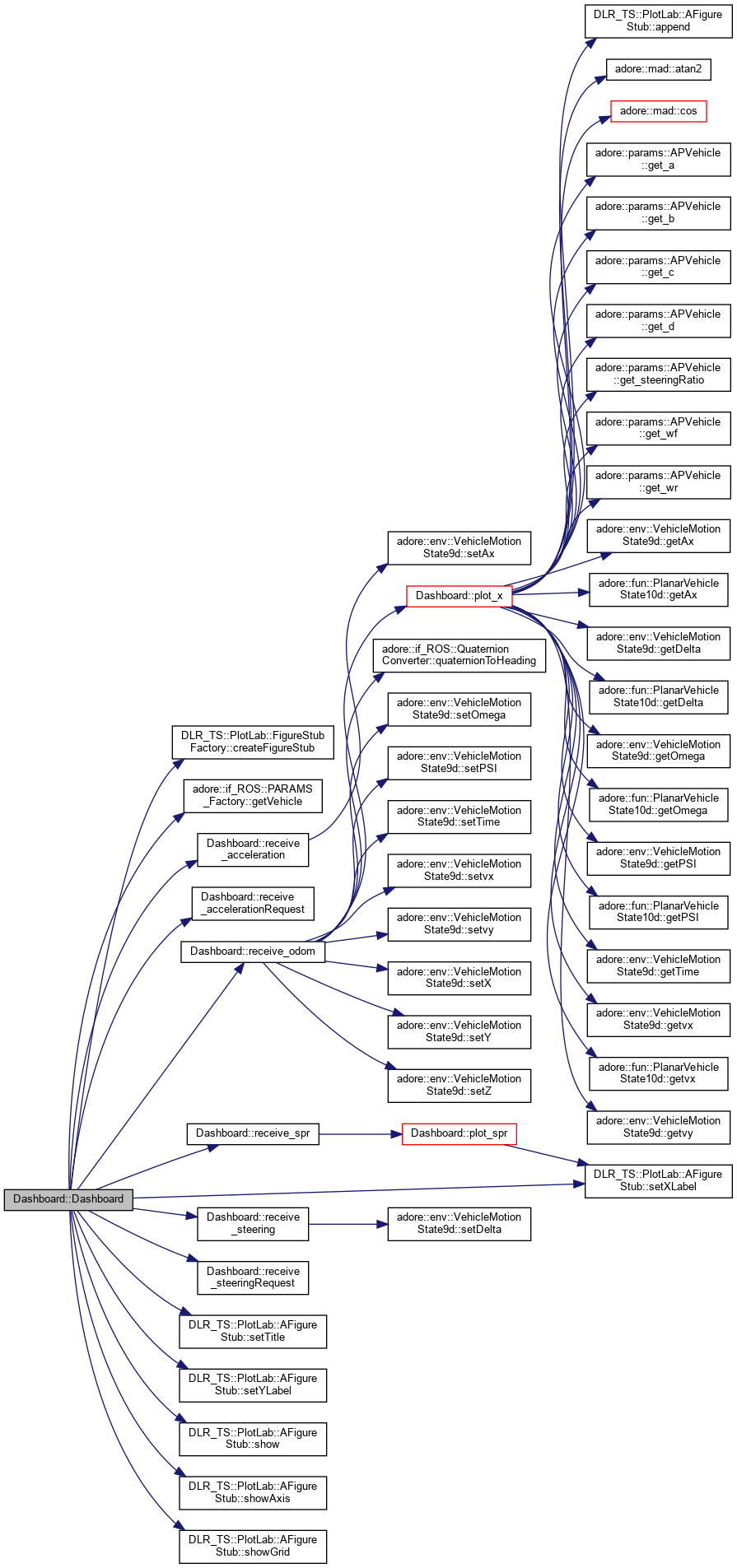
◆ Dashboard()
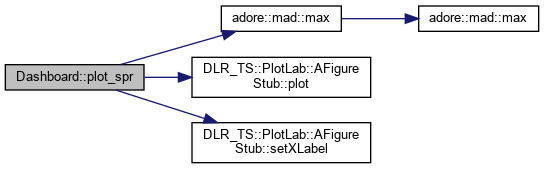
◆ plot_spr()
| void Dashboard::plot_spr |
( |
| ) |
|
|
inlineprivate |
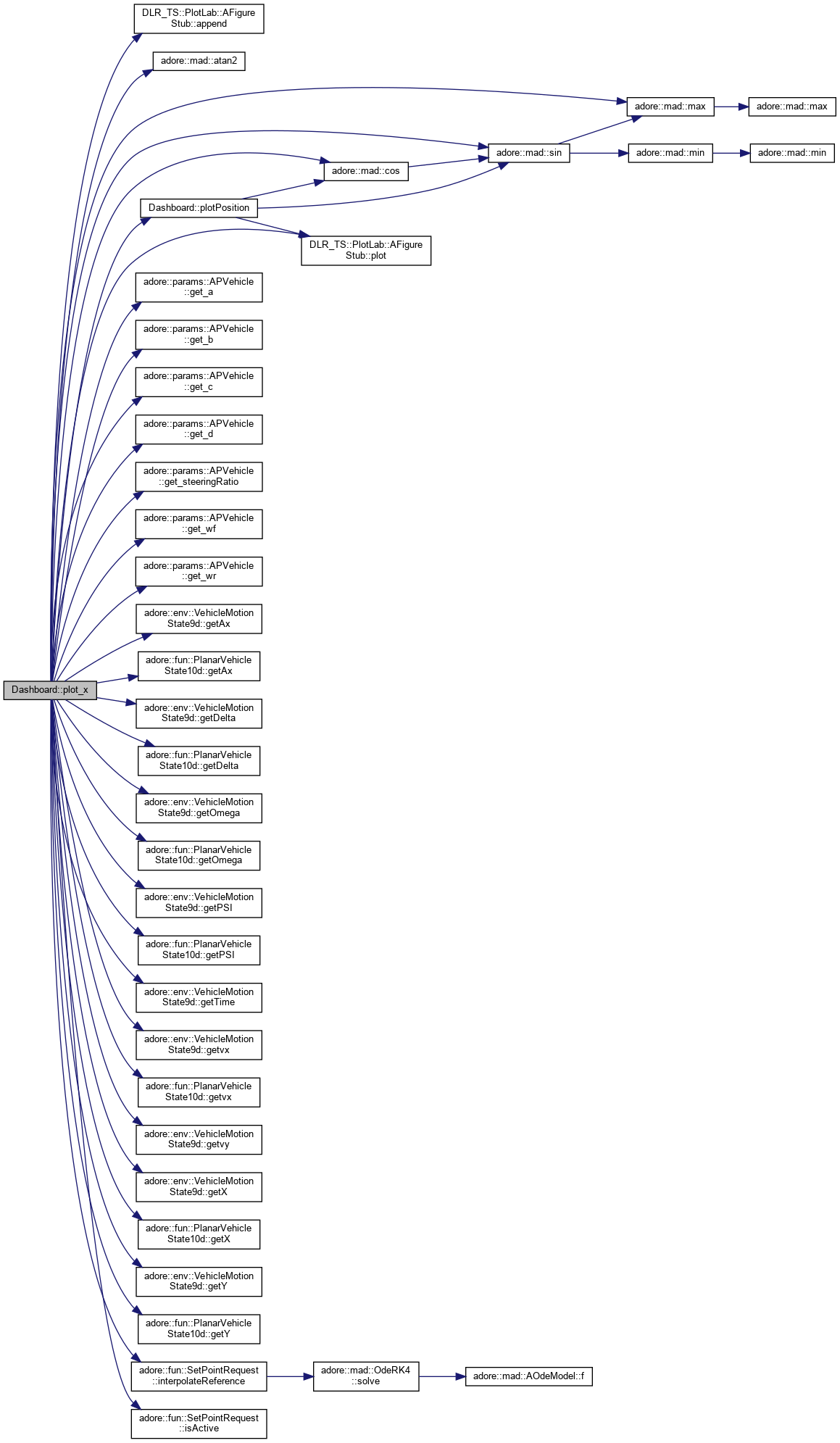
◆ plot_x()
| void Dashboard::plot_x |
( |
| ) |
|
|
inlineprivate |
◆ plotPosition()
| void Dashboard::plotPosition |
( |
const std::string & |
name, |
|
|
double |
gX, |
|
|
double |
gY, |
|
|
double |
psi, |
|
|
double |
L, |
|
|
double |
c, |
|
|
double |
d, |
|
|
double |
w, |
|
|
const std::string & |
options |
|
) |
| |
|
inlineprivate |
plotting a vehicle
- Parameters
-
| name | a tag used to id the vehicle |
| gX | x position |
| gY | y position |
| psi | heading |
| L | |
| c | |
| d | |
| w | |
| options | drawing options, cf. plotlablib |
◆ receive_acceleration()
| void Dashboard::receive_acceleration |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inline |
◆ receive_accelerationRequest()
| void Dashboard::receive_accelerationRequest |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inline |
◆ receive_odom()
| void Dashboard::receive_odom |
( |
nav_msgs::OdometryConstPtr |
msg | ) |
|
|
inline |
◆ receive_spr()
| void Dashboard::receive_spr |
( |
adore_if_ros_msg::SetPointRequestConstPtr |
msg | ) |
|
|
inline |
◆ receive_steering()
| void Dashboard::receive_steering |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inline |
◆ receive_steeringRequest()
| void Dashboard::receive_steeringRequest |
( |
std_msgs::Float32ConstPtr |
msg | ) |
|
|
inline |
◆ axfb_
◆ deltafb_
| double Dashboard::deltafb_ |
|
private |
◆ figure_delta_
◆ figure_ex_
◆ figure_ey_
◆ figure_odom_
◆ figure_psi_
◆ figure_sprx_
◆ figure_xy_
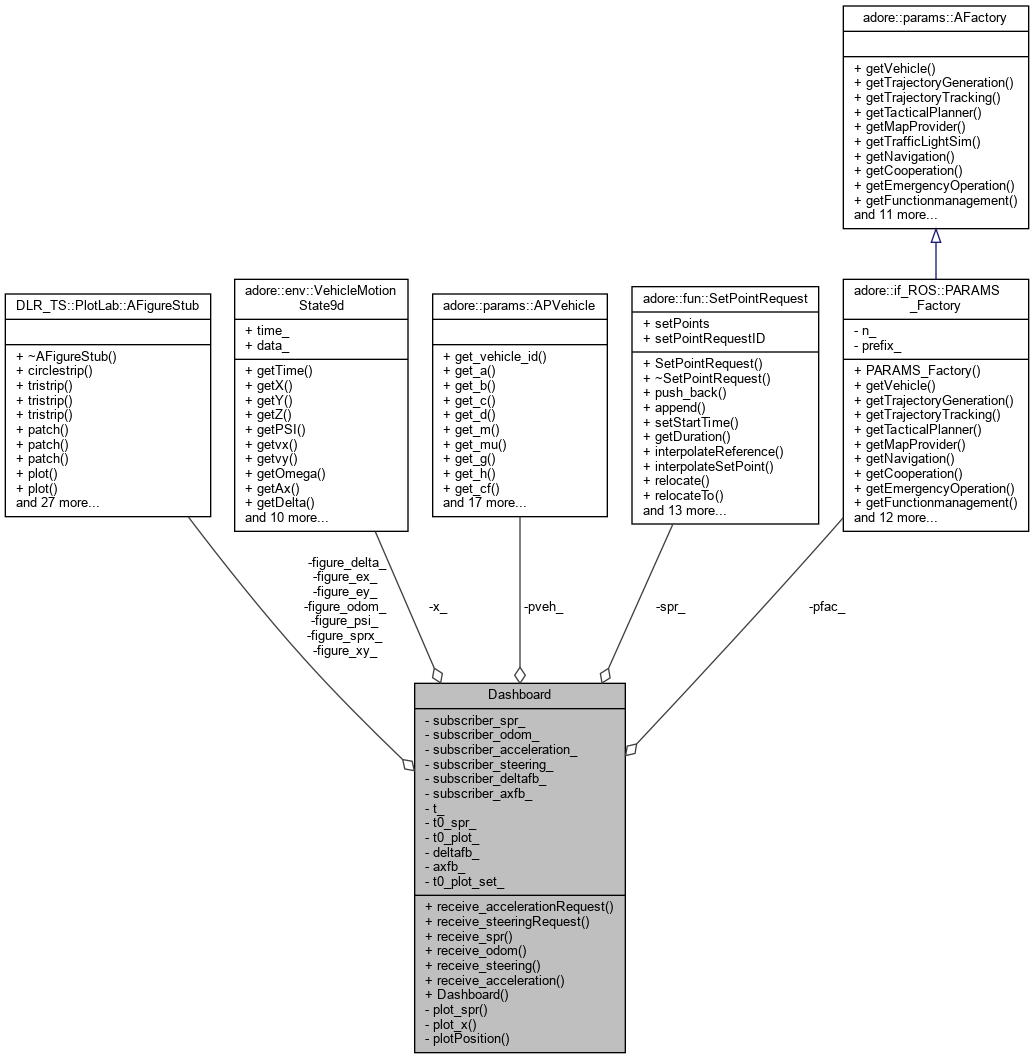
◆ pfac_
◆ pveh_
◆ spr_
◆ subscriber_acceleration_
| ros::Subscriber Dashboard::subscriber_acceleration_ |
|
private |
◆ subscriber_axfb_
| ros::Subscriber Dashboard::subscriber_axfb_ |
|
private |
◆ subscriber_deltafb_
| ros::Subscriber Dashboard::subscriber_deltafb_ |
|
private |
◆ subscriber_odom_
| ros::Subscriber Dashboard::subscriber_odom_ |
|
private |
◆ subscriber_spr_
| ros::Subscriber Dashboard::subscriber_spr_ |
|
private |
◆ subscriber_steering_
| ros::Subscriber Dashboard::subscriber_steering_ |
|
private |
◆ t0_plot_
| double Dashboard::t0_plot_ |
|
private |
◆ t0_plot_set_
| bool Dashboard::t0_plot_set_ |
|
private |
◆ t0_spr_
| double Dashboard::t0_spr_ |
|
private |
◆ t_
◆ x_
The documentation for this class was generated from the following file: