Automated Driving Open Research (ADORe)
![]()
About ADORe
Eclipse ADORe is a modular software library and toolkit for decision making, planning, control and simulation of automated vehicles. It is developed by The German Aerospace Center (DLR), Institute for Transportation Systems 🔗.
- ADORe is ROS 2 🔗 based
- ADORe is fully containerized using Docker 🔗
- ADORe is currently deployed on DLR TS institute research vehicles FASCar 🔗 and VIEWCar II🔗
- ADORe is developed with algorithms and data models applied in real automated driving system for motion planning and control
- ADORe features mechanisms for safe interaction with other CAVs, infrastructure, traffic management, interactions with human-driven vehicles, bicyclists, pedestrians
ADORe is designed around both single agent automated driving (SAAD) and multi agent automated driving (MAAD), to allow both individual and cooperative driving behaviors. ADORe's features can be separated into the following categories.

SAAD
While driving automated for a single agent, for example on a vehicle like the DLR NGC, ADORe utilized the SAAD modules, viewing ADORe SAAD as a black box of inputs and outputs, get a representation as seen below.

Diving deeper into the ROS2 node structure of ADORe SAAD leads to be the structure seen below.

MAAD
When using ADORe for control of multiple agent in a cooperative environment, ADORe MAAD can calculate trajectories and behaviors for multiple vehicles at once. Viewing ADORe MAAD as a black box of inputs and outputs, it can been show as seen here.

Documentation
In order to get started, it is advised to first check system requirements, follow the installation instruction and then try out the demo scenarios.
ADORe In Action
Here you can see one of our automated test vehicles being operated by ADORe:





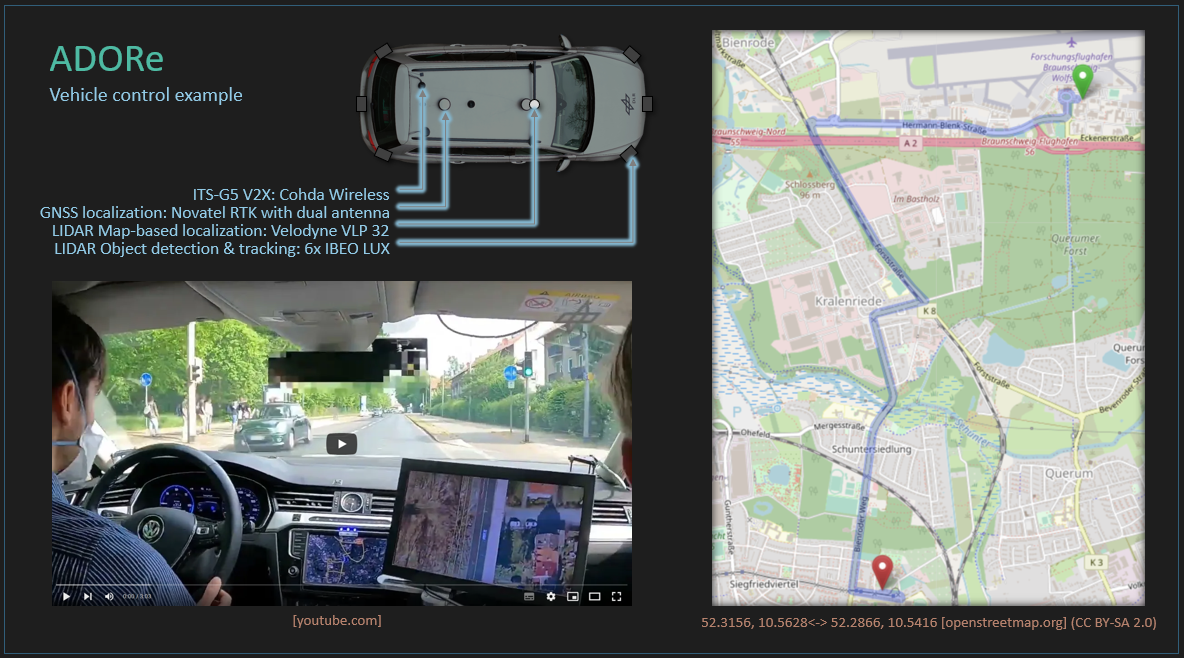
Example application
The following video shows an automated vehicle controlled by ADORe in an urban setting in Braunschweig, Germany: